The Italian Aerospace Information Web
by Aeromedia - corso Giambone 46/18 - 10135 Torino (Italy)
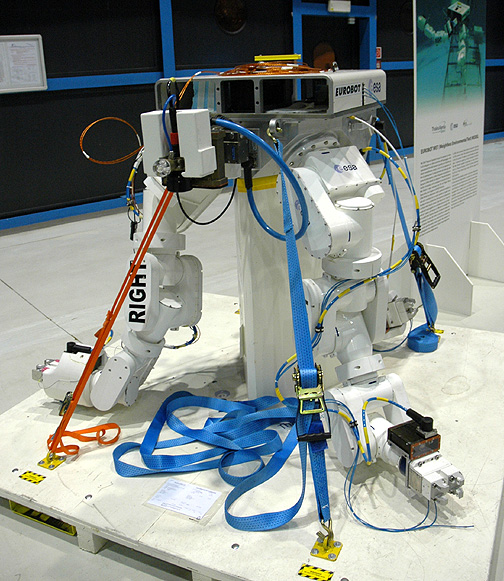
Il modello sperimentale dell’Eurobot realizzato dalla Thales Alenia Space Italia. Nel 2003 l’Agenzia Spaziale Europea espresse la volontà di sviluppare un robot in grado di aiutare l’equipaggio della Stazione Spaziale Internazionale nelle rischiose operazioni EVA (Extra Vehicular Activity), con l’obiettivo di ridurne sensibilmente i tempi. Per sperimentare il comportamento dell’Eurobot già dalle prime fasi del progetto, fu sviluppato un prototipo subacqueo "Weightless Environmental Test Model" da provare nella Neutral Buoyancy Test Facility dell’ALTEC. La NBTF – una delle esclusive infrastrutture dell’ALTEC - è un’enorme vasca studiata specificatamente per simulare in modo realistico le attività in assenza di gravità degli astronauti e degli equipaggiamenti spaziali. Il WET Model dell’Eurobot è stato realizzato, per conto dell’ESA, da Thales Alenia Space Italia con il supporto EADS-Astrium. Il WET Model ha dimensioni simili a quelle dell’Eurobot operativo ed è costituito da un corpo centrale sul quale sono montate tre braccia identiche, che ricalcano le dimensioni e le forze delle braccia umane. Ogni braccio ha sette punti di snodo ed è equipaggiato con una telecamera ed una mano meccanica ("end-effector") capace, ad esempio, di afferrare le maniglie EVA presenti sulle superfici esterne della Stazione Spaziale. La testa di Eurobot dispone di un’ulteriore telecamera che controlla la zona circostante. Il Wet Model dell’Eurobot, una volta immerso in acqua, ha un assetto perfettamente neutro, grazie alla presenza di 24 galleggianti che compensano il peso di ogni segmento del robot in maniera indipendente. Attualmente Eurobot è uno dei tanti programmi in attesa di finanziamento per passare alla fase successiva di sviluppo. (Aeromedia)
The experimental WET Model of Eurobot manufactured by Thales Alenia Space Italia. In 2003, the European Space Agebcy proposed the development of a robot to help the International Space Station crew during EVA (Extra Vehicular Activity) operations. The assistant robot would significantly save EVA time thus reducing risk. To obtain an early feedback on operations/interactions aspects, an early prototype of Europbot (the Wet Model) capable of operating in a wet environment i.e. "Neutral Buoyancy Test Facility", has been developed for ESA by TAS Italia, with the support of EADS-Austrium. The Eurobot wet model is similar in size and configuration to the intended Flight Model. It consists of a central body structure with three identical arms sized to human dimensions (length and strength), each arms shows 7 joins and is equipped with a camera and an "end-effector" capable, for exemple, to grasp an EVA hand rail. A head camera on a pan & tilt mechanism provides a complete monitoring view of the worksite. The Eurobot Wet Model has been made neutral buoyant by indipendently compensating each of its links with floaters, 24 in total. Eurobot project is stand-by, awaiting further financing for the successive development phase. (Aeromedia)